
PIC , Robots y automatismos
CMUcam4
Bueno, me he comprado una flamante cámara CMU CAM 4 . Como ya sabéis esta cámara es un sensor de visión desarrollado por la Carnegie Mellon University. Son cámaras de código abierto, las cuales se pueden reprogramar y utilizar como sensor de visión para cualquier microcontrolador que coloquemos en nuestro ROBOT o automatismo, también se podría utilizar en la cadena de montaje de una fábrica, para detectar un determinado producto y separarlo para realizar algún proceso específico.
La he comprado por Ebay y me ha venido en un embalaje…
Digamos un tanto espartano, en una bolsa de plástico con burbujas y una caja de cartón cerrada con cinta de embalar. Y... nada más. Sin manual, sin cables, sin nada.
Por el manual de instrucciones no me preocupo, pues hay mucha información en internet. Pero creo que tendré que fabricarme todo lo demás.
Consultando la información que hay en internet, he llegado a la conclusión, de que aunque se anuncia como de código abierto, parece que la han diseñado para que se use con las placas de arduino, las cuales no conozco, mi intención es utilizarla como sensor de imagen en un robot, el cual tendrá como cerebro un PIC16F877A.
Alguien podría pensar que un PIC no tiene capacidad para procesar imágenes en tiempo real...
Pues puede que sea así, pero, no importa pues el trabajo de procesado de imagen ya lo hace el microcotrolador de la cámara, se supone que si quiero saber datos de la imagen, lo único que tengo que hacer es solicitar la información via comunicación serie, la cámara la suministra y mi PIC hace lo que tenga que hacer según lo tenga programado.
Estas cámaras básicamente lo que hacen es seguir colores y dar información de esta actividad y de algunos datos estadísticos de los colores que están siguiendo.
Mi primer problema ha sido decidir como alimentarla... consultando los esquemas y la documentación está claro que lo más facil es con el Barrel Jack, pero... ¿el positivo va por el centro o por el lateral del conector?
Si no se ve bien la siguiente imagen, ir a VER\ZOOM de la barra de menú.
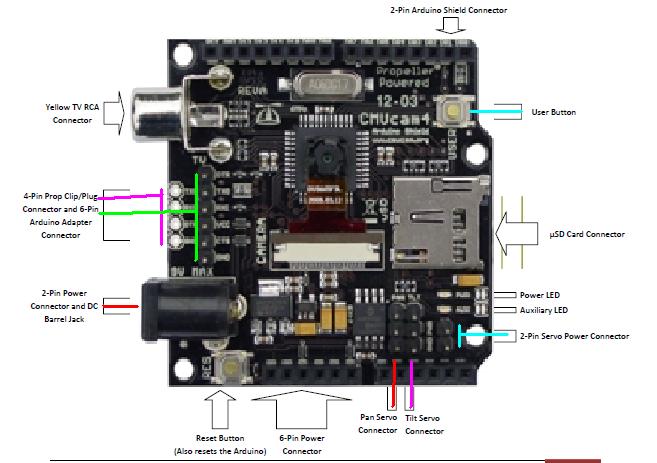
Junto al Barrel Jack, en la placa, hay dos agujeritos que tiene marcados el positivo + y el negativo -, pues nada, con polímetro en mano buscamos la polaridad en el Barrel Jack y he llegado a la conlusión de que el positivo va por dentro. Aprovechando que tengo una fuente de alimentación genérica con un selector de tensiones, la pongo en posición 5 VDC, la enchufo, se enciende el led y no sale humo.
Esta cámara viene preparada para conectar dos servos, uno para movimiento horizontal y otro para movimiento vertical (PAN y TILT). Estos servos los controla la cámara cuando sigue colores de una imagen y hacen que la cámara mire automáticamente hacia esos colores.
Los servos tienen una entrada de voltaje solamente para ellos, aunque el 0V DC es común al resto de la placa. Cuidado con invertir la polaridad en esta entrada, no sé si afectaríamos al circuito de la cámara, pero lo seguro es que afectaríamos a la alimentación de los servos. Esto seguramente quemará el circuito de control del propio servo, si te pasa esto no tires el servo, quitale el circuito quemado, recortales el tope que tiene en una rueda interior y tendrás un motorcito con reductora, que van muy bien para mover robots. Hay mucha documentación sobre esto en internet.
Lo siguiente es ¿como comunico mi MCUcam4 con mi ordenador sin utilizar las placas arduino y la plaquita "Pro Plug" de conversión USB - RS232 ?.
Ver MAX232.
